Kalman-Filter#
Description#
Kalman-filters are a solution to problems where predictons and observations measurement erro need to be combined to get a corrected measurement. They work in situations where the problem is linear. They use a set of equestions and consecutive observational data inputs containing to estimate the state of a process, in a way that minimizes the mean of the squared error.
History#
goes back to Kalman and Bucy
The Kalman filter was invented by Rudolf Emil Kalman in his now famous paper[1]. Its first use was on the Apollo missions to the moon, and since then it has been used in an enormous variety of domains.
arguably, single most state estimator in the field of control engineering
There are Kalman filters in aircraft, on submarines. Wall street uses them to track the market. They are used in robots and in laboratory instruments. They are used to perform medical imaging and to remove noise from cardiac signals. If it involves a sensor and/or time-series data, a Kalman filter or its varient is usually involved.
Assumptions#
linear system, i.e. \(\dot{x} = A x + B u + \nu, x(0) = x_0\), where \(x\) is the state, \(u\) is the input, and \(\dot{x}\) is the time derivative
linear output, i.e. \(y = C x + \mu\)
Gaussian process noise \(\nu\) & Gaussian measurement noise \(\mu\)
Question#
Given a measurement \(y\), how to determine the state \(x(t)\) at time \(t\)?
Why is this relevant? Usually, you cannot measure the entire state \(x\) of the system, but only a few outputs \(y\).
Solution#
use a filter that minimizes the mean-square error
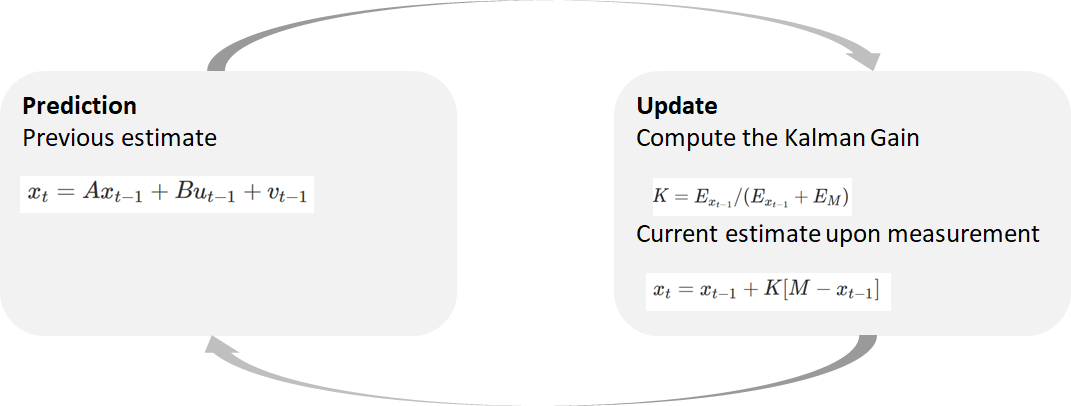
the Kalman filter consists of two steps:
prediction step
use linear model to predict where the state should be
update step
use the measurement to correct the prediction
\(x_t = x_{t-1} + K[M - x_{t-1}]\)
\(x_t\) = Current Estimate \(x_{t-1}\) = Previus estimate \(M\) = Measurment
and The Kalman Gain \(K = E_{x_{t-1}}/(E_{x_{t-1}} + E_{M})\) \(E_{x}\) = Error in estimate \(E_{M}\) = Error in measurement
Therefore, \(0<=k<=1\) and if \(K\) is large, close to one, the observation are more accurate and prediction/estimation is unstable and if \(K\) is small, close to zero, the measurements is uncertain and estimate are stable. Hence, the vulue of \(K\) determined whether the estimation emphasise on observation or prediction.
The steps are iterative as long as new measurement are available.
Key Terms#
The system is the object that is intended to estimate.
The state of the system is the current configuration or values of the system of interest. In other words, the state should be understood as the actual value of the system.
The measurement is a measured value of the system.
The state estimate is filter’s estimate of the state.
Examples#
Applications#
Relation to other fields#
Kalman filter is a recursive Bayesian estimator
inverse problems
A widely used method for nonlinear systems is the Ensemble Kalman Filter (EnKF) introduced by Evensen[2]. The focus of EnKF is usually on application to state or parameter estimation rather than solving Bayesian inverse problems. Recently, the interest in the EnKF for UQ in inverse problems has increased and in the UQ project we use it to estimate the uncertainties of earth system models.
Uncertainty propagation
Variants#
Ensemble Kalman filter Polynomial Chaos Expansion Kalman Filter
Ambiguities and field-specific meaning#
Kalman filtering is also known as linear quadratic estimation (LQE).
Further reading#
[1] Kalman, R. E. (1960). A New Approach to Linear Filtering and Prediction Problems. Journal of Basic Engineering, 82(1), 35–45. https://doi.org/10.1115/1.3662552
[2] Evensen, G. (1994). Sequential data assimilation with a nonlinear quasi-geostrophic model using Monte Carlo methods to forecast error statistics. Journal of Geophysical Research: Oceans, 99(C5), 10143–10162. https://doi.org/10.1029/94JC00572
Lessons learned from today#
New words for the dictionary come up while writing an entry to the dictionary
It is good to pair up people who know about the topic with those who don’t